







Írta: Stewet (2006 11 09)
Az Előzmény Előzménye
Nem sok tutorban olvastam (eddig), hogy a leírni szándékozott művelethez, folyamathoz a szerző (fordító) un. előszót írt, én mégis ezzel kezdeném. Itt, a Mindentbele oldalán sok-sok segítséget kaptam barátoktól, és ezzel a munkával szeretném megköszönni segítő szándékukat. Nevezetesen: amikor ruhát szerettem volna készíteni - karakterekhez - keresésem eredménye mindig egy "topix cloth script" állományt talált. Sajnos a letöltött blend-ek rendszeresen nem működtek, mert mint később Hentitől megtudtam, idő-limitált volt a script futtathatósága. (Ezen azért csodálkoztam, mert ugye a Blender köztudottan nyílt prg, tehát - elvben - a script is lehetett volna véglegesen használható. Mégsem volt az, sajnos)
Nos, ilyen előzmények után adott megoldást meridian barátom. Egy linket a Blendernek egy olyan verziójához, amiben ez a funkció - mármint a ruha-szimuláció - elérhető volt.
(Mellékesen: nem fedte elképzeléseimet a program eme funkciója, mert valódi ruhát - nadrág, szoknya, blúz stb. nem készít, de a tárgyaknak ruhaként való viselkedésének szimulálására kiválóan használható)
Úgy gondoltam, más is járhat ebben a cipőben és nagy segítség lehetne számára, ha a beépített funkciókat nem kell egyesével tesztelgetnie, hanem egy viszonylag részletes, magyar nyelvű leírásból tanulhatja a ruha-szimulálást. Nem igérem, hogy minden részlet világos lesz, de igyekszem egyszerűen lefordítani az angol oldalak infóit. (linket lásd lentebb)
Jogosan tennék fel a kérdést a Blender felhasználók: "Miért nincs benne a Blenderben?" Utánanéztem, és a bevezető részben erre is válaszolok, de előtte megjegyezném, hogy a leírás "csupán" a fordításokat tartalmazza, de később rátérünk a tutorialra is, légy türelemmel! Tehát lássuk a lényeget:
Cloth Simulation - Ruha-szimuláció
Háttér Információ:
Ennek a kódnak a legnagyobb része már létezik egy másfajta alakban, az aktuális Softbody implementációban. Ütközés-érzékelést és az arra adott választ akartunk létrehozni néhány más opcióval, hogy a felhasználó gyorsan és viszonylag egyszerűen tudja használni eme funkciókat.
A ruha-módosító implementáció két fő részből áll: a feloldó-rendszer és az ütközés-rendszer. A feloldó-rendszer az a rész, ami szimulálja a fizika többségét (értsd: gravitáció, súrlódás) a ruhaszimulálás mögött. Az ütközés-rendszer, ütközés-érzékelést kezel, és az ütközésekre adott választ. A feloldó-rendszerről jelenleg a http://graphics.stanford.edu/courses/cs468-02-winter/Papers/Rigidcloth.pdf címen található egy leírás. (Egyszer érdemes átolvasni - angol)
A szimuláció alapvetően úgy működik, hogy ponttömegek csatlakoznak egyfajta rugózáshoz. A ruha az az anyag, amit külső erők érnek, mint például a gravitáció. Annak a számításai, hogy ezek hogyan válaszolnak a külső és a belső erőkre (melyről a rugózás gondoskodik) határozza meg a ruha viselkedését. Háromféle rugózásból választhat a felhasználó, ahol külön-külön, de akár együttesen is állíthatja a rugózás merevségét:

Minta
Structural Springs: Ezt a rugózást a háló élein (edge) építi fel a rendszer. Nyújtja a ruha fő szerkezeti integritását. (a képen az 1. érték) Shear Springs: Ezt a rugózást egy négy pontból álló háló átlóin építi fel a rendszer és ezen átlóval szemben fejt ki ellenállást. (A shear deformációt jelent és a képen ő a 2. érték) Flexion Springs: Működése hasonló a Structural Springs-hez, azzal a különbséggel, hogy igyekszik inkább a párhuzamos élekre helyezni a rugózást. Ezenkívül ez a rugózás a hajtogatásnak is ellenáll, merevebb, és a ruha megpróbálja megtartani eredeti alakját. (a képen a 3. érték)
Mielőtt tovább lépünk, egy fontos dolgot azonban érteni kell: azt, hogy a szimulálás idő-alapú. Lehetetlen az atomok és a molekulák közül mindegyiket modellezni a ruhában és azokban a tárgyakban, amikkel összeütközik. Ez túl sok időbe kerülne úgyhogy kiegyeztünk azzal, hogy használjuk a ponttömegeket és a rugózást, amiket fent leírtam.
Részletesebb információt (angolul) a http://mediawiki.blender.org/index.php/BlenderDev/ClothSimulation oldalon olvashatsz, ezenkívül innen töltheted le azt a Blender verziót, melyben ez a funkció elérhető a Modifiers panel - Add Modifier menüből, (lásd lentebb), illetve megnézhetsz a Cloth-szimulátorral készült rövid animot is. Windows és Linux alá egyaránt elérhető, de Windows rendszert használók, Figyelem!! - a letöltött állomány csak egy exe-t tartalmaz, mellé kell tenni a következő állományokat:

Példa
Ez a tutorial ennek az oldalnak a fordításán alapul, mint már említettem, de nézzük tovább, mit tartalmaz még az oldal. Először is néhány képet:

Az animáció két képe
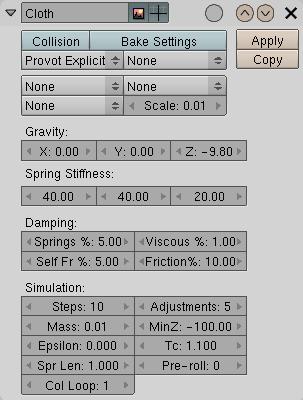
A Módosító Panel és azok Paraméterei

Az első paraméter-csoport
Collision (Ütközés): Ez egy kapcsoló. A kijelölt objektum egy ütközéstárgy lesz. Az ütközéstárgyak nem ruhatárgyak, csak megengedik a ruhatárgyaknak, hogy reagáljanak rájuk, amikor összeütköznek. Hogy az ütközéstárgy egy ruhatárggyal ütközzön, ennek a gombnak aktívnak (bekapcsolt állapotúnak) kell lennie. (Bekapcsolásakor az alábbiakban módosul a panel képe)

Minta
További lehetőségek a Collision kiválasztásakor:
Moves: Megmozdítja az objektumot a szimuláció alatt.
Deform: Deformálja az objektumot a szimuláció alatt.
Bake Settings: Ez a gomb Bake-léshez kapcsolja a ruhamódosító panel módját.
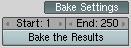
Lényege a következő: az animáció első és utolsó képkockájának beállítása (alapértelmezetten 250 frame van beállítva) és a Bake the Result gomb aktivizálásával elkészíti az animációt. Ez nem egyenértékű az [ ] - ANIM gombjával, mert ekkor csak a Cloth-panelen lévő beállítások kerülnek kiszámításra.
] - ANIM gombjával, mert ekkor csak a Cloth-panelen lévő beállítások kerülnek kiszámításra.
Simulation Type (Szimuláció Típusa): Jelenleg csak egy van megoldva, a Provot. Mindazonáltal 3 fajta integráció van, az Explicit , a Middle és Runge-Kutta. (Ez utóbbiról még olvasni fogsz a másik funkcióban)

Szimuláció Típusa
Collision Type (Ütközés típus): A felhasználó kiválaszthatja az ütközések típusát. Jelenleg csak a KDOP opció érhető el. (Tapasztalatom szerint más típus kiválasztásakor a program hajlandó lefagyni)

Ütközés típus
Pinned Vertex Group (Megtűzött vertex-csoport): Ha egy vertex-csoport van kiválasztva ebben a menüben, azokra a vertexekre nem hat a ruhamódosító. (Mintha gombostűvel rögzítenéd - megtűznéd - a csoportként kijelölt vertexeket, hogy azokra a művelet ne legyen hatással - Csak akkor van hatása, ha létrehoztad és mondjuk elnevezted a csoportot - a képen látható példában én csoport-nak neveztem a kijelölt vertex-csoportot)

Vertex-csoport panel
Vertex-csoport menü
Mass Scale Vertex Group (Tömeg-méretű vertex-csoport): Ez a vertex-csoport megengedi a felhasználónak, hogy megsokszorozza a kiválasztott ponttömeg súlyát, az adott csoportban. (lásd a Vertex Group ábrát) Így a ruha egyes részeinek lehet különböző a súlya, ami azt a hatást éri el, mintha a ruha nedves lenne, vagy a kijelölt eleme(i) nehezebbek lennének a többi résztől.
Tömeg-méretű vertex-csoport
Mass Vertex Group (Vertex Csoport Tömeg): Ez a vertex-csoport megengedi a felhasználónak, hogy közvetlenül meghatározza a vertexek súlyát. A Scale paramétert arra használja, hogy beállítsa ennek az eredményeit.

Vertex Csoport Tömeg
Scale (Méretezés): Mass Vertex Group eredményének méretezése.

Méretezés
Gravity (Gravitáció x, y és z): Ez szolgáltat külső erőt a ruhába, akár mindhárom irányba is. A példában a -9.80 érték "z" tengelyen a "lefelé" irányultságot jelenti, vagyis a gravitáció (mondhatni, a nehézségi erő - ohh, azok a régi fizika órák) akkor mutat "lefelé", ha az érték negatív.

Gravitáció
Spring Stiffness (Rugózás Merevsége): Ez a három paraméter a Structural, Shear és Flexion típusú rugó merevséget irányítja, szabályozza (a tutor előzményében már tettem említést e három rugózásról - olvass vissza!)

Stiffness

Vissza a Panelhez
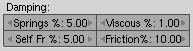
A Damping (Csillapítás) Panel
Springs (Rugózás Csillapítása): Csillapító tényező, ami a rugózással előállított erő ellen hat.
Viscous (Nyúlás Csillapítása): Ezt a csillapító tényezőt alkalmazza a ruha minden mozgásába, a magasabb érték eredménye olyan, mintha vízen vagy sáron keresztül mozogna a ruha.
Self Fr: Önsurlódás Csillapítása: Ezt a súrlódás csillapító tényezőjeként fogja használni, amit a ruha önütközései okoznak.
Friction: Súrlódás Csillapítása: Ezt a csillapító tényezőt alkalmazza azokhoz a ruha vertexekhez, amik a "collisoin" (ütközés)-tárgyakkal ütköznek.
Vissza a Panelhez
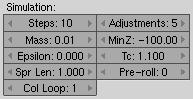
A Simulation (Szimulációs) Panel
Steps (Szimulációs Lépések): Mennyit lépjen a frame a szimulálásban. Magasabb érték jobb eredményt ad, de hosszabb számolás az ára.
Adjustments (Beállítások Szimulálása): Megpróbálja megakadályozni, hogy a rugózás a ruhában Tc által túllépjék az eredeti hossz többszörösét. Amikor az érték -1, a Structural beállítású rugózás akár 100-szor merevebbé válhat. A merevebb rugózási hosszt osztja az eredeti hosszal. 0-nál (nulla), nem csinál semmit. 1-nél vagy nagyobb értéknél, a Provot algoritmusa beállítja a rugózást. (Tapasztalatom szerint a -1 érték esetén a program hajlamos lefagyni)
Mass (Tömeg Szimuláció): Beállítja egy vertex alaptömegét a ruha-tárgyban. Bármilyen adott vertexnek való tömege, a befolyásolhata a végső értékét a Mass Scale Vertex Group-nak és/vagy a Mass Vertex Group-nak. (A Mass Scale Vertex Group és a Mass Vertex Group értelmezését lásd fentebb)
MinZ: Szimulál egy olyan mesterséges padlót, amiről a ruha vertexei nem fognak lemenni.
Epsilon: Az ütközés-érzékelés távolsága és a válasznak puffere. A kicsi értékek (0.001-0.005) tartományában általában jobban működik, bár néhány esetben éppen a nagyobb értékek lehetnek a jobbak. Ki kell tapasztalni!
Tc: Ez arányként értelmezi a kritikus deformáció-hosszat az eredeti rugózási hosszban. Ennek az értéknek nincs hatása, ha a Adjustments beállított értéke 0, (nulla).
Spr Len: Beállítható egy mesterségesen nagy vagy kicsi alap-rugózási hossz. Amikor ez az érték 1.0, a szimulálás "rendesen" viselkedik. Egynél kisebb érték esetén, a rugózást úgy értelmezi, mintha azok rövidebbek volnának a ruha éleinél, és a ruházatot összehúzza, hogy szorosabban illeszkedjen a modelhez. Ha ez az érték nagyobb mint egy (1), kinyújt egy erőt, hogy húzza ki azt a ruhatárgyat, ami ugrást ad egy szoknyának vagy a ruhának. (az összehúzás ellentétje) E funkciót nehezebb volt lefordítani, mint a beállítás eredményét megtekintve megérteni.
Pre-roll (Szimulálás elő-tekerés): Ez az animáció kezdését megelőzően ad néhány mesterséges frame-t hogy a ruha megtalálja a pihenő pozícióját.
Col Loop: Ütközés Ismétlés Szimulálás: Ez a maximális számú idő/lépés ütközéseket teszteli. Ez a paraméter valószínűleg elmarad a későbbiekben.
Vissza a Panelhez
Ezzel a végére is értünk a fordításnak, jöhet egy egyszerű tutorial. Sokat gondolkoztam, hogy mit is tartalmazzon, és főleg hogyan!? Döntésem az eredeti tutor alapján született, vagyis egy olyan függönyt készítünk el, aminek hátulról egy golyó fog ütközni, szimulálva az eddig leírt funkciókat.
A jelenet elkészítését nem nagyon részletezném képekkel az egyszerűsége miatt. Az eredeti (alapértelmezett) kockát töröltem. Elölnézetben egy Plane-t, valamint egy UVSphere-t (32, 32 vertex és Set Smooth) és egy BezierGörbét hoztam létre. Talán, ha megemlíteném, hogy előbb a gömb kijelölése ( ), aztán a [Shift] nyomvatartása mellett a görbe kijelölése () jött. A [
), aztán a [Shift] nyomvatartása mellett a görbe kijelölése () jött. A [ +
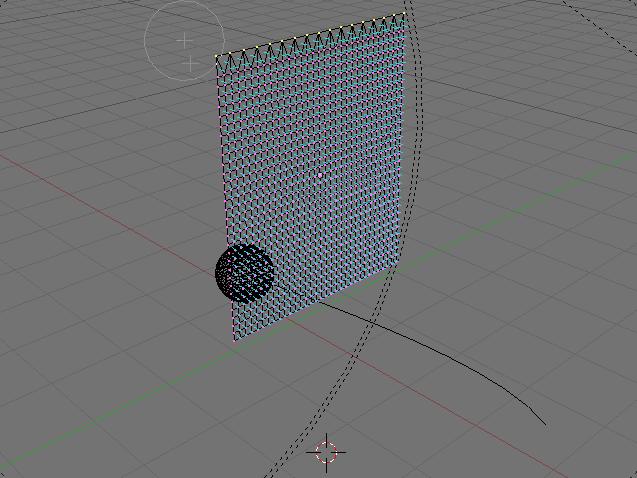
+ ] -> Follow Path kiválasztásával csupán a gömb mozgását hozzákötöttem (szépen ezt szülő-gyermek kapcsolatnak nevezik) a görbe vonalához. Tehát az animáció teljes idején a gömb ezen az útvonalon fog haladni. Mutatok egy képet az alapjelenetről (wire):
] -> Follow Path kiválasztásával csupán a gömb mozgását hozzákötöttem (szépen ezt szülő-gyermek kapcsolatnak nevezik) a görbe vonalához. Tehát az animáció teljes idején a gömb ezen az útvonalon fog haladni. Mutatok egy képet az alapjelenetről (wire):
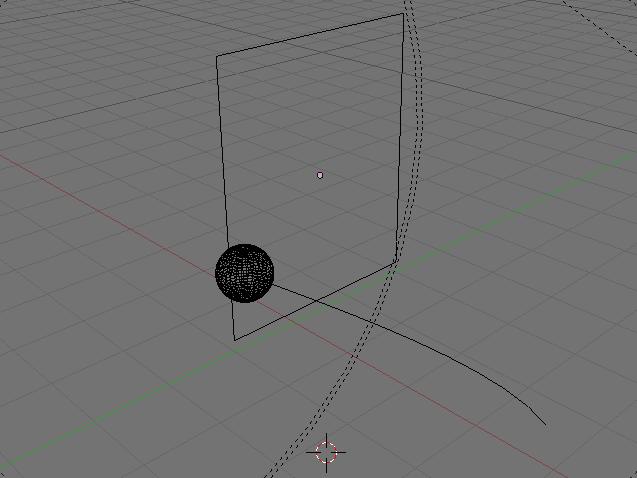
Alapjelenet
Jöhet a Plane felosztása -> a Plane-en (jelöld ki a JobbEgérGomb-bal a Plane-t) -> Válts Edit Mode-ba [TabKEY] -> [ ] és Subdivide ([] használatát ismételd el 5-6 alkalommal, míg elég sűrű nem lesz a mesh-háló)
] és Subdivide ([] használatát ismételd el 5-6 alkalommal, míg elég sűrű nem lesz a mesh-háló)
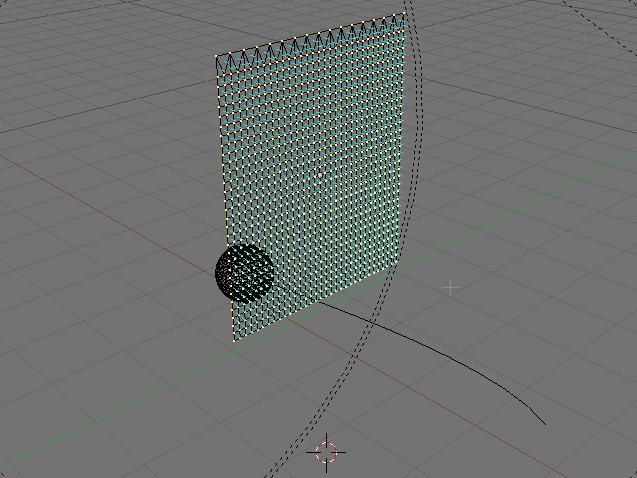
Plane felosztása
Vertex-csoport létrehozása: [ ]-el szüntesd meg a vertexek kijelöltségét -> [
]-el szüntesd meg a vertexek kijelöltségét -> [ ] kétszeri lenyomásával egy kör alakú kijelölő eszközzel a Plane felső sorában lévő vertexeket jelöld ki (ezek lesznek a "merev" részei a függönynek)
] kétszeri lenyomásával egy kör alakú kijelölő eszközzel a Plane felső sorában lévő vertexeket jelöld ki (ezek lesznek a "merev" részei a függönynek)
Vertex-csoport létrehozása
Nyomj [ ]-et, ami az Editing (Szerkesztés)-re navigál. Keresd meg a Link&Materials Panelen a Vertex Groups-ot. Ahhoz, hogy létrehozzunk vertextGroup-okat, kattints a "NEW" gombra - Létre is jött a csoport "Group" néven. Állítsd be a Wight mezőben a vertexek súlyát 0.000-ra, és nevezd át a Group nevet mondjuk "merev"-re.
]-et, ami az Editing (Szerkesztés)-re navigál. Keresd meg a Link&Materials Panelen a Vertex Groups-ot. Ahhoz, hogy létrehozzunk vertextGroup-okat, kattints a "NEW" gombra - Létre is jött a csoport "Group" néven. Állítsd be a Wight mezőben a vertexek súlyát 0.000-ra, és nevezd át a Group nevet mondjuk "merev"-re.
Nincs más hátra az "ASSIGN" gombbal össze is kell rendelted a vertexeket a paraméterekkel, vagyis a Plane felső sor sarokpontjainak súlya 0.000 és a nevük (mármint a csoport neve): "merev". Használhatsz más elnevezést, de jusson eszedbe, amikor a Cloth módosító megfelelő menüjében ki kell választanod, hogy mely vertex-csoportnak nem szabad mozognia, hogy mi is a neve?!!
Fordítsuk meg a kijelölést, hogy a függöny többi részére pedig pont az ellenkező hatást gyakorolhassa a módosító. [] és Select Swap menü megfordítja a kijelölést.
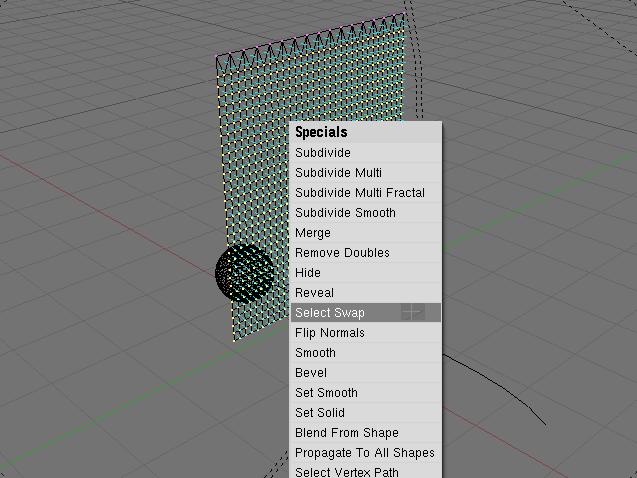
Select Swap menü
Újra elő kell venni a VertexGroups-ot, vagyis -> "NEW" gomb, a súlyt állítsd 1.000-re, nevezd el "fuggony" néven és click az "ASSIGN" gombra. Tehát most a felosztott Plane vertexei kétféle beállítást tartalmaznak:
- 1: A felső sor 0.000 súllyal bírók, vagyis nem fog hatni rájuk a fizika
- 2: A többi vertex 1.000 súllyal teljes mértékig a fizika törvényeinek van "alávetve"
Sajnos nem tudom megmondani, hogy a jelenet capture képei miért lettek minőségben ennyire olvashatatlanok, de nem felismerhetetlenek. Többszöri próbálkozásom ellenére sem tudtam ennél jobb képet "előállítani", de remélem, ez nem akadályoz meg senkit a munka elvégzésében. Sajnálom, ha tudok megoldást, upgrade-lem a dolgot.
Jöhet a szimuláció beállítás. Elsőként jelöld ki a gömböt. Ő lesz az a tárgy, ami ütközni fog. Kattints a Modifiers Panelen az "Add Modifier" menüre és válaszd a Cloth-ot. Mivel ütközés-tárgyra érvényesítjük a beállításokat, aktivizáld a "Collision" kapcsolót. A Collision Type (Ütközés-típus)-t állítsd KDOP-re, a "Move" gombot kapcsold be, valamint az Epsilon értékét húzd 0.010 értékre.
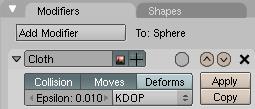
Beállítások
Jelöld ki a Plane-t és válaszd ki újra az Add Modifier menüből a Cloth-ot. Minden további magyarázat helyett megmutatom az általam beállított értékeket.
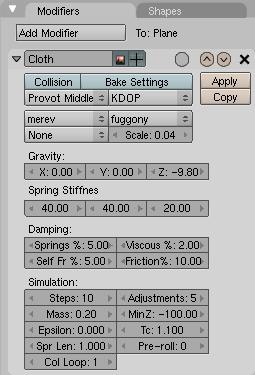
Beállítások
Nincs más hátra - Jöhet a Bake, vagyis az animáció elkészítése, hogy a beállított frame-határok között kényelmesen kiválasztható legyen a legideálisabb kép, amit renderelni szeretnénk. Én az EndFrame értékét 300-ra állítottam.
A legvégén, hogy mégicsak bemutassam az egész jelenet animációját az [] Format Panelén beállítottam az animáció jellemzőit: AVI Codec - Méret 320x240 és ANIM gomb.
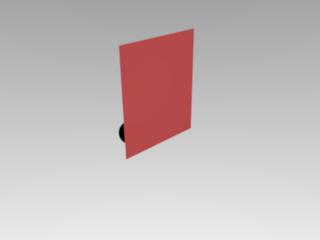
A szimuláció Bake-el létrehozott 80. képkockájának render-képe - a golyót másik rétegre helyeztem, ezért nem látható a képen. (most ne nézzétek, hogy lenne mit javítani rajta, ez az az eset, amikor nem a forma, hanem a tartalom a fontosabb)

A szimuláció Bake-el létrehozott 80. képkockájának render-képe
... és nem utolsó sorban lássuk magát az animációt:
Példa animáció: MBanim.avi
Ezzel a Cloth Simulation tutorja befejeződött. Olvasd el még néhányszor a fordítást és kísérletezd ki a saját jeleneted legjobb beállítását. Jó munkát kívánok!
SoftBody System - Puhatest Rendszer
Előzmény
Erről a funkcióról itt, a Tutorial szekcióban --Lászlo-- készített már
leírást, amit egy szép függöny készítéssel egészített ki. A SoftBody
részletesebb beállításának funkcióira, és annak működésére ugyan nem
tért ki, viszont én ezzel a leírással egészíteném ki Laci
mondanivalóját.
Az Alapok
Két metódus (eljárás, módszer) irányítja a Rendszert.
Goal: Tárgy - A SoftBody (Puhatest), amin az eljárás működik, mint a gombostű(k) egy kiválasztott készleten ellenőrzi, hogy mennyit bír el a puha-test. Amennyiben a Goal értéke 1.00, vagyis teljesen aktív, nincs SoftBody hatás. Amikor az érték 0.00 (nulla) a testre kizárólag a fizikai törvények hatnak.
Azáltal, hogy 0.0 és 1.0 között értékeket állítasz be a Goalnak, variálhatod, hogy a tárgyra csak az animációrendszer vagy a SoftBody hasson jobban. Használd a Vertex Group súlyrendszerét, definiáld a Goal súlyát vertexenként. Ezzel a hatással természetesebbnek tűnik a rugóerő, mely szabályozza a vertexek mozgás-távolságát az eredeti pozíciójukhoz képest.
Springs: Az Edge Spring Stiffness meghatározza, hogy az élek mennyire tudják megtartani az eredeti méreteiket. Például, hogy átlós éleket ad hozzá egy kockán belül, ez merevebbé fogja tenni a tárgyat. (mintha kocsonyás lenne az anyag). Az E Stiff paraméterrel a tárgyak megpróbálnak többet vagy kevesebbet megtartani az eredeti alakjukból, de úgy, hogy még mindig dinamikusan mozogjanak.
Megjegyzés: Amikor engedélyezed a SoftBody használatát, ne feledd, idő alapú szimulációt készítessz. Időben hátrafelé mozogni az animációban annyi, mintha visszatérnél az eredeti kiinduláshoz. Használd a TimeLine Window-ot,

A gombja
hogy interaktívvá tegyed a SoftBody hatásokat. Amint elégedett vagy a szimulálással, a Bake, egy statikus animációrendszerbe teszi a jelenetet. Előnye, hogy a "Bake"-el létrehozott animáció gyorsabban játszódik le.
A Softbody ruhaként való szimulálása, különösen az ütközés-érzékeléssel együtt még mindig tesztelő szakaszban van. Az ütközés-kód igényel nagyobb javításokat. A későbbi kiadásokban egy jobb irányítású él-opciókat próbálunk beépíteni. Jelenleg minden él egyforma hatással van a SoftBody Rendszerben.
A SoftBody Kezelői Felülete és Beállítások

Panel
Friction: Surlódás - Beállítja a tárgy surlódásának mértékét (0.000 - 10.000 között)
Grav: Gravitáció - No Comment :-) (0.000 - 10.000 között)
Error Limit: Runge Kutta határ - Definiálja a lépés-méretet a szimuláció idején. A kis érték pontosabb eredményt ad, viszont hosszabb a számítási idő is. (0.010 - 1.000 között)
Mass: Tömeg - Vertexek tömege. A nagyobb tömeg, a tömegre való tekintet nélkül lelassítja a gravitáció mozgását, kivéve, ahol a mozgás állandó. (0.000 - 50.000 között)
Speed: Gyorsaság - Ezzel tudod irányítani a belső időzítőt. (0.010 - 100.000 között)
Use Goal: Tárgy Használat - Használd a mozgatást az animációkból a szimulációban (ilyen pl: az Ipo, Deform, Parents...) A Tárgy, a kívánt végpont vertexek alapján animálódik. Azt, hogy a SoftBody Rendszer hogyan próbálja megvalósítani ezt, a Tárgy is meghatározhatja, miközben használja a merevség-erőket és annak csillapítását.
Goal: Tárgy - Az alapértelmezett Tárgy súlya, minden vertexnek, amikor nem a Vertex Group van kiválasztva. Ha a Vertex Group van kiválasztva (a(z) Use Goal gomb aktív) - akkor ennek helyén a kiválasztott csoport neve látható. (0.000 - 1.000 között)
G Stiff: A Tárgy rugó-merevségét állítja. Az alacsony érték nagyon gyenge rugózást hoz létre a magas érték egy erős rugózást alkot. (0.000 - 0.999 között)
G Damp: A Tárgy Súrlódása. A magasabb érték csillapító hatással van a SoftBody-ban. (0.000 - 10.000 között)
G Min/GMax: A vertexek festésekor válik láthatóvá ez az érték. A legalacsonyabb értékű vertex (GMin) piros szint kap, míg a legmagasabb vertex szine (GMax) kék lesz. (0.000 - 1.000 között)
Use Edges: Élek Használata - A Mesh élei rugózásként működnek. (0.000 - 0.999 között)
Stiff Quads: A négyszög-felületek átlóit rugózásként használja. Ez megakadályozza, hogy a négyszög-felületek teljesen "összedőljenek".
E Stiff: Az élek rugózási merevségét határozza meg, hogy az élek mennyire feszüljenek. Alacsony érték esetén rugalmas (elasztikus) anyagot készít, magas érték esetén merevebb anyagot kapsz. (0.000 - 0.999 között)
E Damp: Az él-rugózás súrlódása. Nagyobb érték csillapítja az E Stiff effektet. (0.000 - 10.000 között)
Ha minden opciót megfelelően állítottál be, elindulhat a "Bake", vagyis a paraméterek alapján való frame-k kiszámítása.
A Panel beállításai
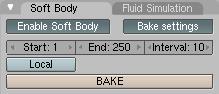
A panel
Start/End: A szimuláció kezdő és vég-frame számai
Inerval: Inervallum - A freme-k között beállítható lépésszám. A közbenső frame-pozíciók is számításra kerülnek interpolációval (átlag-számítással)
Local: A helyi koordinátarendszer alapján készíti a számításokat.
Bake: Elindítja a folyamatot. A bonyolultságtól függően, lehet, hogy rövid, de hosszú időt is igénybe vehetnek a számítások. ESC-el a folyamat megszakítható, ekkor Free Bake-re vált a felirat és módosíthatóvá válik a paraméterezés.
Nos a fordításnak akár vége is lehetne, de elkerülhetetlen, hogy ne essék szó az ütközésről is. A SoftBody ütközésbeli használatakor ezekkel a beállításokról is gondoskodni kell, tehát jobb, ha tovább olvassuk a leírást.
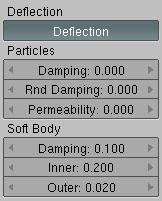
A Deflection (Elhajlás) Panel
Ha a Deflectiont beállítod, aktivizálod - vagyis, mint egy kapcsolót bekapcsolod - a SoftBody bármilyen Mesh Objecttel össze tud ütközni. Mióta az ütközésérzékelés-kód viszonylag egyszerű, az ütközések néha lassúak és nem éppen precíz eredményt adnak. (Fentebb említettem, hogy a kód ezen része még tesztelés alatt van, úgymond béta verzió).
Az Inner és Outer értékek határoznak meg egy olyan erőt a Mesh felületeken belül, amik távolabbra el tudják tolni a SoftBody vertexeit.
Az Outer érték a felület normal irányába hat, az Inner érték ennek az ellenkező irányába, a "hátoldalon" fejti ki hatását. Az effekt, az értéktől függően, csak ezen a távolságon belül tud érvényesülni.
Megjegyzés: Ezt a funkciót egy nem SoftBody objektumra kell kijelölni, mert két Puhatest tárgy nem tud ütközni egymással. A Damping funkció a csillapítás mértékét határozza meg.
Az Inner és Outer értékek értelmezési tartománya: 0.001-1.000 között van, míg a Damping 0.000-1.000 közötti értéket vehet fel.
Nos, mivel ehhez a szekcióhoz, itt az oldalon már --László-- készített tutort, nem ismételném meg az általa elmondottakat, csupán annyival egészíteném ki, hogy ha a SoftBody tárggyal ütköztetni szeretnél egy másik tárgyat, akkor arra a másik tárgyra érvényesíteni kell a Deflection paramétert a 3 funkciójával (Damping, Inner, Outer) - Egy képet azonban megmutatnék a SoftBodyról - (talán) felismerhető az asztalterítő :-) - Igen, ez utóbbi eljárással készült. Ha igény mutatkozik rá - itt, a Blender Fórumban - elkészítem a részletes tutorialt az asztalterítő létrehozásához.

Eredmény
Kellemes időtöltést a munkákhoz és sok sikert!!
